El diámetro de los tubos por lo que van los conductores dependerá de la cantidad de cables que vayan por su interior y de la sección de estos cables. Aquí tienes una tabla.
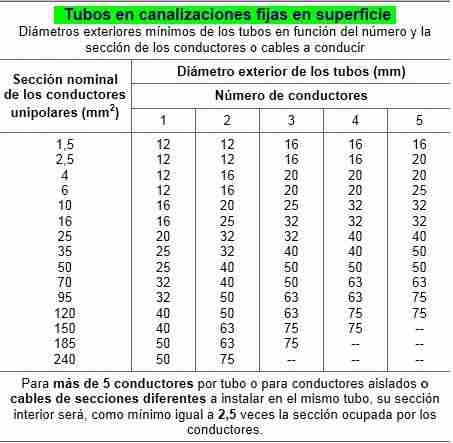
¡OJO! Hay varios métodos de instalación y su diámetro dependerá del método.
Si lo deseas ponte en contacto con Electrónica Orense y te enviaremos un electricista para asesorarte gratuitamente si tu vivienda o instalación eléctrica cumple con los requisitos del REBT.
Las Secciones de los conductores depende de la potencia contratada y de cada circuito, pero de forma general se utilizan las siguientes:
- Iluminación -> Secciones 1,5mm2
- Tomas de fuerza generales -> 2,5mm2
- Cocina y horno -> 6mm2
- Lavadora, lavavajilla y termo o caldera -> 4mm2
- Calefacción, aire acondicionado -> 6mm2
- Automatización -> 1,5mm2
Recalcando que estos valores son para instalaciones de 2 conductores (fase y neutro) más tierra, de aislamiento termoplástico (pvc o similar) bajo tubo empotrado en obra.
Si quieres asesoramiento gratuito para comprobar si tu instalación eléctrica cumple con los requisitos del REBT no dudes en ponerte en contacto con Electronica Orense y enviaremos un electricista sin compromiso para revisar tú instalación eléctrica.
En cada habitación se colocarán, como mínimo los elementos de la siguiente tabla: 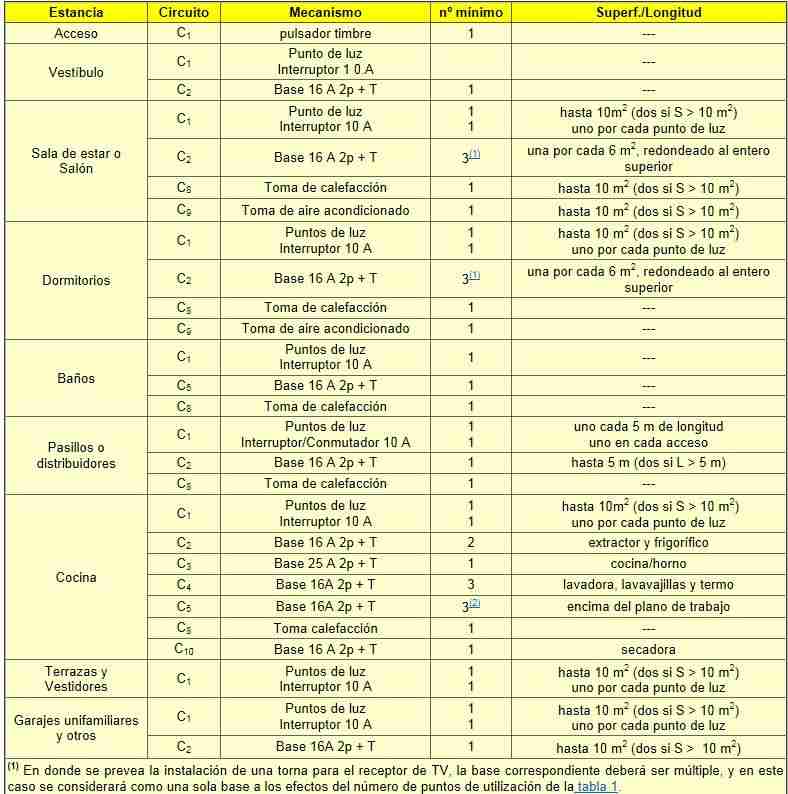
Si tienes dudas no dudes en ponerte en contacto con Electrónica Orense y enviaremos un electricista sin compromiso para asesorarte sobre tu instalacion electrica.
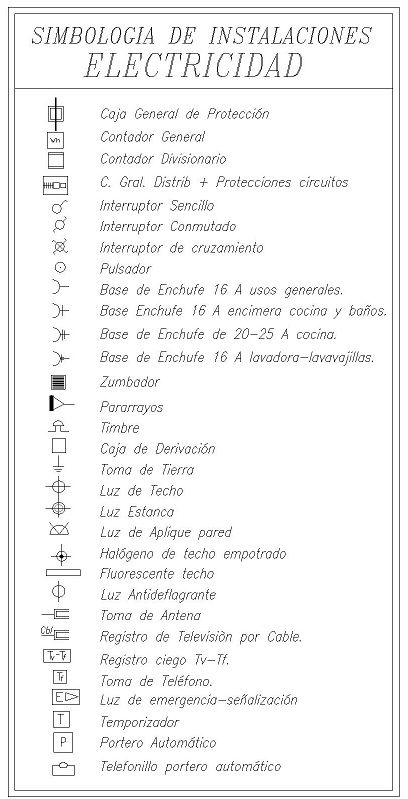
Los esquemas que se utilizan para las instalaciones son los llamados esquemas unifilares.
Son esquemas donde no se representan todos los cables.
Mediante una línea representamos todos los cables que van por esa línea.
Siempre irán como mínimo 2 cables, la fase y el neutro, y en el caso de enchufes 3, la fase, el neutro y la t.t. 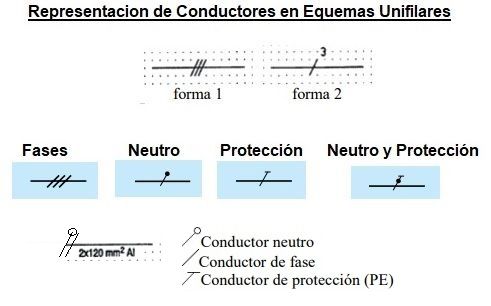 Como ves al principio del circuito solo con poner 2 o 3 líneas atravesadas determinamos si por ese circuito irán 2 o 3 cables.
Como ves al principio del circuito solo con poner 2 o 3 líneas atravesadas determinamos si por ese circuito irán 2 o 3 cables.
La t.t. se representa con media línea.
En multifilar se representan todos los cables. 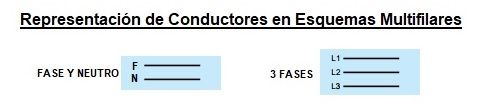 Empecemos con el esquema del cuadro de distribución.
Empecemos con el esquema del cuadro de distribución.
Además lo acompañamos con el esquema de contadores.
Si es vivienda unifamiliar será solo 1 contador.
El esquema de contador es obligatorio.
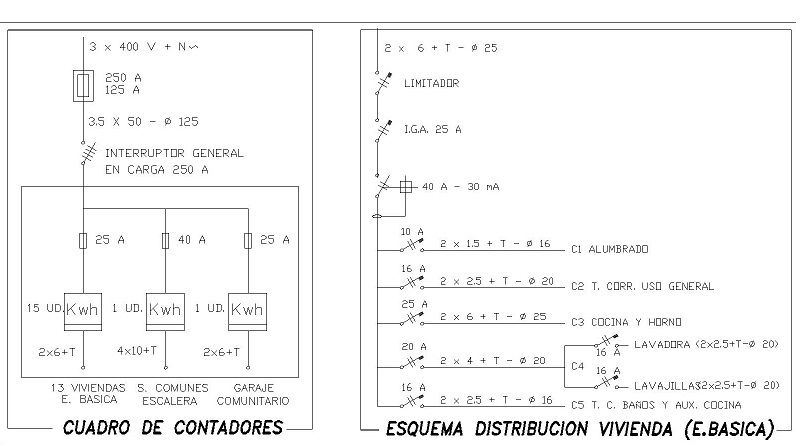
Fíjate que ponemos la intensidad de cada circuito y la sección del cable del circuito.
La T es la toma de tierra. Idif es el interruptor diferencial.
Una sección de 2 x 2,5mm + T, quiere decir 2 cables de sección de 2,5 mm cuadrados + el cable de toma de tierra que normalmente suelo ser de la misma sección. Ahora vamos con el esquema de la vivienda. 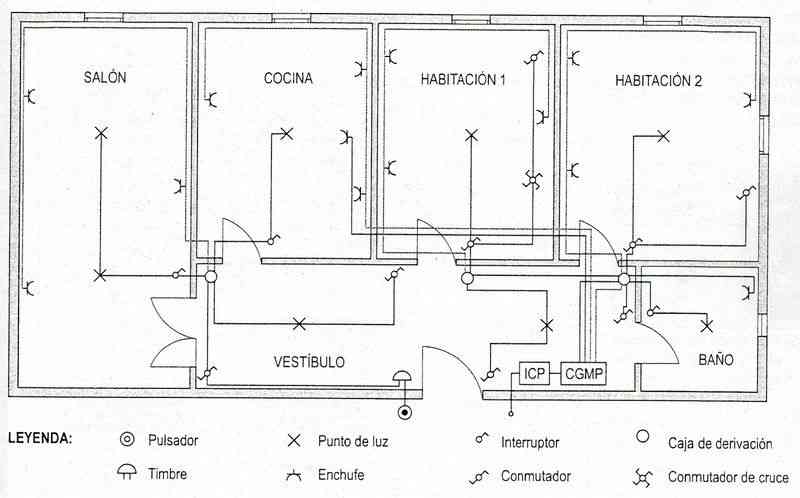 Este sería el circuito de alumbrado, solo vemos el circuito de los puntos de luz y el del baño.
Este sería el circuito de alumbrado, solo vemos el circuito de los puntos de luz y el del baño.
Tendremos otros circuitos similares para los otros 3 circuitos. Fíjate en la leyenda donde vienen los símbolos utilizados.
CGMP es el cuadro de distribución que también se llama Cuadro General de Mando y Protección.
ICP es el interruptor de control de potencia.
Los circulitos que ves en cada habitación serán las cajas de derivación. Ahora solo nos quedaría hacer los otros circuitos de igual forma, conectando los enchufes.
Pero ojo no todos los enchufes son iguales, recuerda que son diferentes dependiendo el circuito al que pertenezca y su intensidad máxima que son capaces de aguantar. En realidad el plano eléctrico en la mayoría de los proyectos solo viene el llamado plano de planta de alumbrado y de fuerza.
En el plano solo se ponen los puntos de luz y los enchufes.
Los puntos de luz si tienen relación eléctrica se unen mediante líneas.
Se supone que el técnico que hace la instalación solo con ese plano y el de del cuadro de distribución ya puede realizar la instalación por completo. Aquí te dejamos un ejemplo: 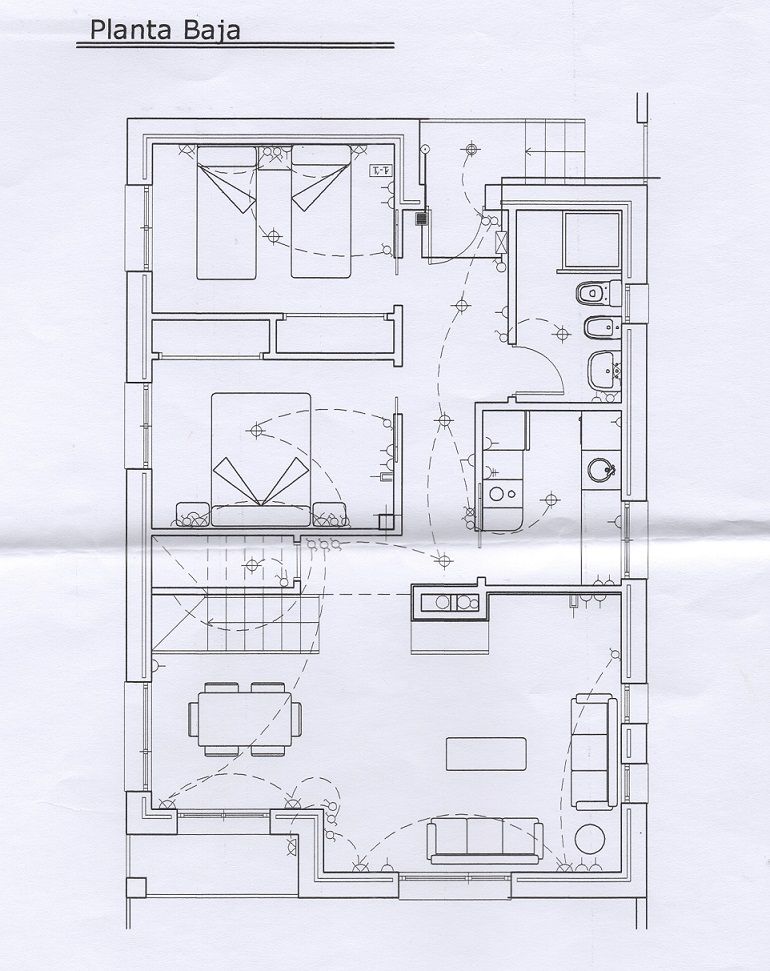
Primero veremos el Cuadro General de Mando y Protección (CGMP) y después iremos explicando parte a parte. Vemos 3 imágenes. La primera es la instalación de cada componente, la segunda y tercera es ya instalado y como lo veríamos en nuestra casa sin el ICP (interruptor de control de potencia) que pondrá la empresa suministradora.
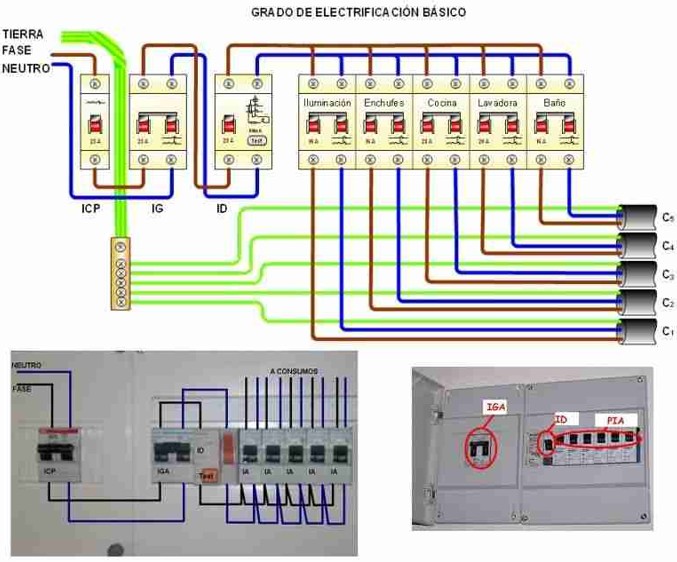
Nota: Hoy en día el ICP no se pone en el cuadro porque viene incorporado en los nuevos contadores digitales, pero aún quedan muchas viviendas con el ICP en el cuadro eléctrico de la vivienda.
Lo primero que nos encontramos es el ICP, interruptor de control de potencia que nos pone la distribuidora para controlarnos la potencia eléctrica que hemos contratado. El ICP NO es nuestro, viene precintado y manipularlo puede traer como consecuencia una multa. Si conectamos aparatos, que la suma de su potencia sea mayor a la que hemos contratado el ICP, saltará cortándonos la corriente en toda la vivienda. Los Grados de Electrificación en viviendas pueden ser dos, básico y elevado. En cada grado hay una potencia contratada diferente:
Por ejemplo, si contratamos 5,75Kw y conectamos aparatos a la vez cuya suma sea mayor de 5.750w, la distribuidora (Iberdrola por ejemplo) no nos deja conectarlos a la vez porque sobrepasamos la potencia contratada y nos corta el suministro con el ICP.
Tendríamos que desconectar algún aparato y volver a subir el ICP.
Si esto nos pasa muy a menudo, lo mejor será contratar una potencia superior.
Es un elemento igual que los magnetotérmicos que veremos a continuación, pero va separado en el cuadro porque no es nuestro, es de la distribuidora.
Aunque el REBT marque estas potencias, las normalizadas son muchas más. Seguidamente vemos otro magnetotérmico llamado IGA (interruptor general automático) cuya misión es poder cortar la corriente en todos los circuitos a la vez.
Protege contra sobrecargas en la instalación (un cortocircuito por ejemplo).
Funcionan como los magnetotérmicos que veremos a continuación.
Debe calcularse para cortar con el total de la potencia contratada. P= 5750w P=VxI; I= de 26A aunque se suele poner de 25A. Para tener claro la potencia que tendremos que contratar lo que se hace es una previsión de potencia para la vivienda.
Después del IGA veremos agrupados los Interruptores Magnetotérmicos, también llamados PIA (pequeño interruptor automático).
Uno para cada circuito, con la misión de separar los circuitos y además de protegerlos contra sobrecargas. Las PIAS o Magnetotérmicos son dispositivos que protegen a los aparatos y a los conductores de cortocircuitos y sobrecargas.
Se instala un PIA por circuito tal que la intensidad capaz de soportar depende de la sección de los conductores del circuito. Existen PIAs de 10A, 15A, 20A, 25A o 40A (depende de la potencia máxima del circuito a proteger: P=VxI).
Al sobrepasar la intensidad de la PIA por el circuito (esto sucede por ejemplo en un cortocircuito en el circuito), la PIA corta el suministro de corriente en el circuito protegiéndolo. Pero además las PIAs como ves en el esquema separan los 5 circuitos.
Si bajamos una PIA solo desconectaremos los elementos de la casa conectados al circuito de esa PIA.
Si haces la prueba y bajas el de cocina verás como las luces siguen funcionando.
Luego las PIAs tienen 2 misiones: proteger la instalación y separar los circuitos. Dependiendo del circuito (ya vimos los 5 circuitos antes) tenemos una PIA diferente: - PIA para circuito de iluminación de 10A. - PIA para circuito de tomas de corriente de 16A. - PIA para circuito de cocina y horno de 25A. - PIA para circuito de lavavajillas, lavadora y termo de 20A. - PIA para tomas de corriente de baños y cocina de 16A. Además el cuadro de distribución llevará un Diferencial para proteger en toda la instalación a las personas contra contactos indirectos.
La función que tiene es desconectar la instalación eléctrica de forma rápida cuando existe una fuga de corriente a tierra (por la carcasa de metal de la lavadora por ejemplo), con lo que la instalación se desconectará antes de que alguien toque el aparato averiado. En caso de que una persona toque una parte con corriente donde no debería de tener corriente (contacto indirecto), el interruptor diferencial desconectará la instalación en un tiempo lo suficientemente corto como para no provocar daños graves a la persona.
El diferencial protege a las personas contra corrientes de fuga. La sensibilidad es el valor que aparece en catálogo y que identifica al modelo, sirve para diferenciar el valor de la corriente a la que se quiere que "salte" el diferencial, es decir, valor de corriente de fuga que si se alcanza en la instalación, ésta se desconectará. El tipo de interruptor diferencial que se usa en las viviendas es de alta sensibilidad (30 mA) , ya que son los que quedan por debajo del límite considerado peligroso para el cuerpo humano. El diferencial corta toda la instalación (todos los circuitos). Algo muy importante y que vemos en la imagen de arriba, los cables de toma de tierra no pasan por ninguno de los elementos, va directamente a cada elemento a proteger.
No pueden cortar nada la línea de tierra ya que no nos protegería en caso de contacto indirecto.
Bien, ya tenemos nuestro cuadro de distribución.
Ahora nos queda hacer la instalación de cada circuito por la vivienda. Tendremos que llevar cada circuito (3 cables por circuito) a cada habitación.
Para eso en cada habitación tenemos encima o al lado de la puerta una caja de derivación.
A esa caja llegan todos los circuitos que se necesitan en esa habitación concreta y de ella sacamos los cables para cada enchufe o punto de luz de esa habitación.
Cada cable sale al punto de luz o enchufe de una regleta, regleta donde llegan los cables del circuito de luz, enchufes, etc.
No se pueden hacer empalmes con cinta aislante.
Lógicamente los cables van por dentro de un tubo, normalmente corrugado, y el tubo a su vez va por dentro de la pared.